
在智驾技术不断迭代和落地的过程中,车企在这一领域的排位座次也发生了重大变化。
继10月23日理想汽车行业首创的端到端+VLM智能驾驶双系统架构全量推送后,11月28日,理想汽车车位到车位功能随OTA 6.5全球首家全量推送。该功能推送后,理想汽车的智能驾驶可实现车位内P挡直接NOA起步,并轻松应对狭窄小区道路、环岛、掉头和复杂施工场景,给车主的驾驶体验带来质的飞跃。
回顾理想汽车的高阶智驾进化历程,从最早的BEV+NPN(先验信息)的全场景NOA,到全国都能开的无图NOA,再到端到端+VLM双系统的推送落地,三次的技术技术跃迁和产品升级,见证了理想汽车在智能驾驶领域的角色变化和华丽转身。从追赶者,到第一梯队,如今已经成为了行业的领先者。
智驾进入AI大模型时代
国内新能源汽车渗透率已经连续4个月超过50%,意味着燃油车正在成为少数人的选择,越来越的人开始拥抱新能源汽车。在新能源汽车加速发展的势能之下,智能化尤其是智能驾驶的重要性显得愈发突出。
智能驾驶的发展路径经过单车智能和车路协同、渐进式和跨越式、纯视觉和多传感器融合等数轮争论和交锋后,以端到端为核心的技术路线变得更加清晰,包括理想汽车在内,特斯拉、华为、蔚来、小鹏等企业都在端到端领域发力。
国信证券研报显示,当前汽车智能化已经具备端到端大模型的技术底层突破,国内市场远期具有近3000亿元的市场空间,智能驾驶奇点时刻渐近。
不同于此前智能驾驶系统分为感知、规划、定位和决策等多个模块,端到端架构强调感知决策一体化,融合在一个大模型之中,其最大优势是减少模块间信息传递损失,提升智驾能力上限。
据了解,理想汽车的端到端技术架构受诺贝尔奖得主丹尼尔·卡尼曼的快慢系统理论启发,在智能驾驶领域模拟人类的思考和决策过程,形成更智能、更拟人的驾驶解决方案。
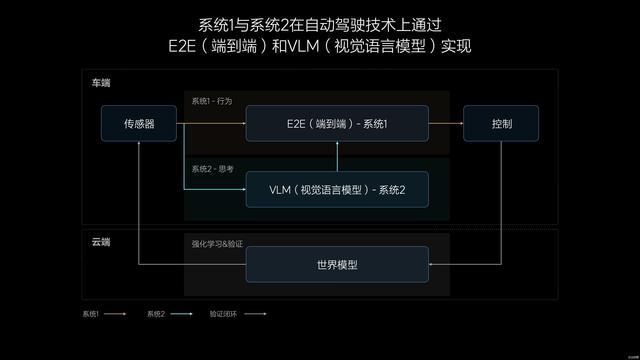
理想汽车提出了世界首创的双系统智能驾驶方案,系统1是端到端模型,它是一个one-model的结构,是真正意义上的端到端,输入是传感器,输出是行驶轨迹,全部由一个模型来实现,中间没有任何规则。端到端大幅度提升了驾驶的安全、舒适和效率,具备更拟人化的驾驶方式。
系统2由VLM视觉语言模型实现,理想汽车是第一个将视觉语言模型成功部署在车端芯片,使自动驾驶具备了应对未知场景的逻辑思考能力。它能像人类一样深刻理解物理世界的复杂交通环境和中文语义,并且辅助端到端,解决安全、导航、法规和舒适等方面的自动驾驶业内难题。
理想汽车行业首创的全新一代双系统智能驾驶技术架构端到端+VLM,标志着理想汽车智能驾驶正式进入AI大模型时代,真正实现像人一样思考,像老司机一样驾驶,场景全覆盖、行驶更舒适、通行更高效。
不止车位到车位
理想汽车“端到端+VLM“智驾在OTA 6.5上实现了车位到车位全场景覆盖能力,即从车位泊出到泊入,全程都能实现无断点智驾。车主从上车就能开一键开启智驾,自主进出园区和识别闸机抬杆,在城市环岛、掉头等复杂场景通行。
这也让理想汽车成为行业首个全量推送这一功能的车企,而华为ADS3.0、小鹏当前只有少部分内测用户可以体验该功能。这背后,主要是基于理想汽车端到端+VLM双系统智能驾驶实现的全场景0断点覆盖。
端到端不依赖规则式逻辑,具备更拟人化的驾驶方式,老司机般的丝滑体验。整体大幅度提升了安全、舒适和效率,能力更强、上限也更高。另外,VLM具备理解物理世界复杂的交通环境和中文语义的能力,它还能辅助端到端解决了安全、导航、法规和舒适等方面的自动驾驶业内难题。具备迭代速度更快,具备全数据驱动、快速迭代的能力。

除了车位到车位的智驾,此次升级还新增了理想首创的基于端到端+VLM实现的全国高速收费站ETC通行功能,自动将导航终点匹配至AVP代客泊车路线,真正实现全程无断点、全场景100%覆盖的智能驾驶体验。支持全国范围所有收费站,高速通行效率再度提升。
理想汽车的行业唯一VLM识别ETC自主通行能力,不限范围、无需学习过程,全国用户都能用。华为等其他智驾系统目前还不具备这样的能力,而小鹏汽车的AI代驾模式则需要依赖学习过程。
这也是基于理想自研端到端+VLM 的视觉语言模型能力,不依赖地图数据,能够以更先进的技术方案解决高速收费站通行的行业难题。
通过端到端+VLM架构,除了让系统开得像人以外,还能理解真实世界复杂的语义信息,这是因为只有理想汽车的新一代智驾车端的模型是端到端+VLM视觉语言模型,而在实现ETC自主通行这个场景中,也是由VLM识别收费站及ETC通道位置,引导端到端系统向ETC通道行驶并通过闸机,这是理想汽车首创的。
要研发端到端+VLM架构,需要极强的底层算法研发能力,需要在双OrinX芯片的架构下兼容端到端和VLM两个独立的大模型,并相互通信,而理想汽车是行业首个将VLM模型部署到Orin芯片上的团队。
在端到端+VLM的加持下,理想智驾在面对U形掉头、环岛通行、旁车切入、限时公交车道等复杂多变的场景下,也能具备快速反应和处理能力,这些功能都是行业首发和领先的。
从后进生到领先者
相较于其他造车新势力,理想汽车的自动驾驶起步较晚, 2021年开始自研,但研发和落地进展飞快,当年底便落地高速 NOA 功能。今年,理想汽车又先后全量推送无图NOA和全新一代智能驾驶技术架构——端到端+VLM双系统,现在已经能实现车位到车位全程智驾的理想汽车,已然成了行业领军者。
理想汽车智能驾驶研发副总裁郎咸朋博士在接受采访时认为,从后进生“逆袭”到第一梯队很正常。他总结了两大原因,首先公司和团队的组织效率非常高效,比如内部有IPD(集成产品开发)流程等。这是公司学习一些先进经验,然后结合理想汽车自己的企业特点进行内化处理的结果。
另外在验证测试方面,理想通过技术提升做到更好的测试和发布效果,同时也减少了时间和人力。而且,测试效果比原来人力测试更好,这是人工智能技术带来的结果。理想
用重建、生成技术取代了人工的测试,重建技术很快就能够重建几百公里的场景,包
括各种天气路况下的场景,这些场景通过人类驾驶未必能够获取。
理想汽车智能驾驶高级算法专家詹锟补充道,理想的智驾团队有比较好的阶梯式研发流程,能做到交付一代、研发一代、预研一代,这是理想能一直紧跟目前智驾最新技术方案的重要原因。
“我们在做无图NOA研发的时候,其实端到端已经开始预研。并不是等无图NOA做
完,再慢慢地切换到端到端架构研发中,前面就已经有了相关技术储备。”他表示,理想已经逐渐找到了通过自动化测试、世界模型高效验证模型的方法,所以才能兼顾智驾研发的速度和质量。
截至目前,理想智能驾驶总用户超过100万,智能驾驶总里程突破26.7亿公里;导航智能驾驶NOA总里程突破14.4亿公里,NOA里程占智驾总里程的90%。其中,10月份理想汽车的城区智能驾驶总里程突破2.3亿公里。
越来越多的用户因为智能驾驶选择理想汽车。数据显示,相比半年前,理想NOA试驾占比已经增长了接近3倍,65%的进店用户都会试驾体验NOA,并且都会体验在城市里的表现。从直接销量上看,目前30万以上车型的AD Max销售占比70%,40万以上的车型中,AD Max 的销售占比已经达到80%。相比今年初,AD Max的销量占比涨幅达到34%。
高阶智驾车型的销售占比提高以及车主智驾使用率的提升,又促进了理想汽车智驾数据的积累和训练,从而形成了正向循环。截止目前,理想汽车智能驾驶训练数据已经达到 26.7亿公里,年底预计会达到30亿公里。另外,理想汽车整体的算力目前达到6.83EFLOPS,相比2个月之前又有大幅提升,预计年底将超过10EFLOPS。在这种每年超10亿元训练算力和基建设施的投入下,理想智能驾驶算法和能力将得以持续进化。

今年10月18日,理想汽车历时58个月达成百万辆交付的里程碑,成为中国首家达成这一成绩的新势力车企,创下中国豪华车最快达成百万辆记录的同时,也是唯一一个均价超过30万元、拥有百万规模的中国豪华汽车品牌。
在新能源汽车的上半场,理想汽车凭借精准的定位和过硬的产品力,率先迈过第100万辆车交付的门槛,在一众造车新势力中脱颖而出。行至新能源汽车竞争的下半场,首创全新一代双系统智能驾驶技术架构、全球首家全量推送车位到车位智驾,在智能化领域再拔头筹的理想汽车,势必会引领中国智能电动汽车行业走向新的高度。




还没有评论,来说两句吧...